��ժҪ�����ȉA��I�Ԃ�늏Sѭ�h������偠t����ˮλ���Ԅӿ������������˹����ܡ����m����ģ�������M�Ŀ�������OӋ����ʩ���SFuzzy��PID��Ͽ��ƣ����F�˟���偠t����ˮλ�����ܿ��ƣ���Ч����������ؓ��׃����ȼ�����r׃����ˮ����׃��������ˮλ��Ӱ푣�偠t����ˮλ������±10mm(�ʽˮλ�y��)��±20mm(���ʽˮλ�y��)�ԃ�(��ˇҪ��±50mm)�����F��偠t�İ�ȫ�\�С�
ѭ�h������(CFB)偠t���g�ǽ�����ڇ��H�ϰlչ��������һ����Ч������Ⱦ�坍ȼ�����g��CFB偠t���g���҇�������I�Ŀ����o���̣��Ǒ����^�V�ĭh��ú�l늼��g֮һ��CFB偠t�ǻ����ИI��늡��������Ҫ�O�䡣��CFB偠t�����^���У��Ԅӻ����Ɔ��}�����_�似�g�lչ���P�I����֮һ��Ŀǰ�����҇�������I�Ԃ�늏S��ѭ�h������偠t���\���У���ˮ��ȼ���ɴ�ϵ�y�����Ͼ����˹��ք��b�ز������P�߾�CFB偠t�����\�е��Ԅӿ����M����̽ӑ�����������`�������˹����ܼ��g�����m����ģ��������F��CFB偠t����ˮλ�����ܿ��ơ�
1��CFB偠t
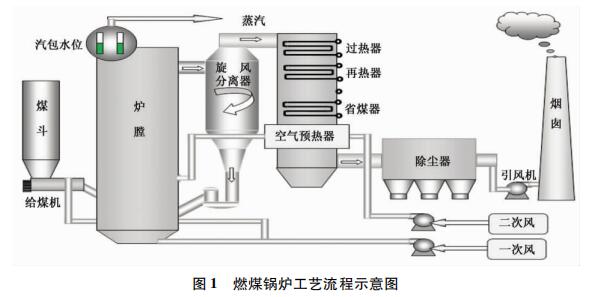
�(��ˮϵ�y):��ʡú��������(��ˮ���x��)���½��ܡ��䡢ˮ��ڡ��^�������ٟ������O�估���B�ӹܺ��y�T�M�ɡ��t(ȼ��ϵ�y):�ɠt�š�ȼ�������c���b�á��՚��A���������L�����t�������ܵȽM�ɡ�
CFB偠t�Ĺ����ɷ֞�3���^��:ȼ��ȼ������������ˮ��������
(1)ȼ���^�̡�ȼ����ú��ͨ�^�oú�C����ú�L�Ͳ�ú�L��ȼú����t�ţ���ú�ڵ��_ȼ���ضȺ�һ߅ȼ����һ߅����Ƅӡ�
(2)�����^�̡�ȼ��ȼ��ጷų��������䟟���c�t�Ńȵ�ˮ���M�Џ��ҵ�ݗ����ᣬ�S���M��β���������cʡú�����A�����M�Пύ�Q���dz��K�ɟ����ų���
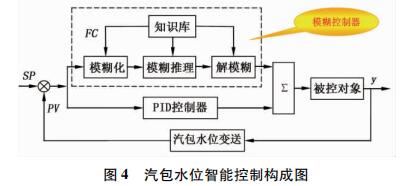
(3)�����^�̡��������Įa���^�̣�����ˮѭ�h����ˮ���x�ɂ����֡����W̎�����ˮͨ�^������������ʡú���A�ᣬ�M��������CFB偠t��ˇ������D1��ʾ
2�����}�����
偠t����ˮλ�������������������ڽoˮ����(�a�������c������ˮ���)��
Ӱ�����ˮλ����������������ؓ��(��݆�C�l늡�������)��ȼ�����r(ú�|��ú����һ���L�������L��)���oˮϵ�y�����ȡ��@Щ��ˇ�����l��׃����ֱ��Ӱ�����ˮλ�ķ����ԡ�
Ŀǰ�҇�����偠t(�����l�)�Ԅӻ�ˮƽ�����^�ͣ�����ˮλ���ƽoˮ���˹��h���քӲ������ڄӏ��ȴ�ˮλ�����l����Ӱ���ˮ���x��������Ʒ�|������(������ˮ)�r�דp����݆�l늙C������~݆Ƭ���O�䣬������ص��ǔ�ˮʮ�����偠t�����ɻ�ը��Ŀǰ��偠t����ˮλ���õ��Ԅӿ��Ʒ����ֻ������_��PID����׃��ǰ����������PID�����ȿ��Ƽ��g����偠t�\����������(�ȡ���_��С)����r���F�Ԅӿ��ƣ����ɔ_��������
��ϵ�y�У���_��偠t�İ�ȫ�����\�У�����ˮλ�y����3�N���ϵĜy��ԭ���Ͷ��c�z�y�����pɫˮλӋ(��ĸˮλӋ)��
�ʽˮλӋ��늘OʽˮλӋ��
���ʽҺλӋ�����ʽҺλӋ�Ĝy���ǻ��ڃ�늘O�g��Һ�w�����w��늳�����ͬ��Һλ�����½���ʹ��늘O�g��������S֮׃��������偠t����ˮλ�y���У����y���|�Ľ�늳������S�ضȵ�׃����׃������Һ������ˮ���x̎��늳����ӽ���ʹ���ښ�Һ�R��^�y������(����)�������F����ˮλ�Ԅӿ��Ʈa������Ӱ푡�
�������ᡢ�l늵�偠t�������a���Ԅӿ��ƬF�偠t�\��ԭ�����������a�^���еĸ��N�ɔ_���أ��M�Ќ��H�ӑB�yԇ�������ؚw���������y�Ŀ��Ʒ������ܼ��r����偠t����ˮλƫ����ɔ_�����
ᘌ��������}���P�߲���һ�N���͵Ŀ��Ʒ�ʽ����һ�����Sģ�������cPID������Y�ϣ��M��偠t�����oˮ��Ͽ���(Fuzzy��PID������)�����F���ᡢ�l�CFB偠t(220t/h��130t/hCFB偠t)����ˮλ�����ܿ��ơ�
3����Q����
����偠t������ˮλ����ؓ�ɡ�ȼ�����r�ͽoˮ�����ȅ�����׃�������ӣ�����ˮλ��偠t�\��
��һ���dz���Ҫ�ıO���������g�ӷ�ӳ��偠tؓ��(�a����������)�ͽoˮ��֮�g������ƽ���Pϵ�����C�����ȵ�ˮλ��һ�������S��������偠t����݆�C��ȫ�\�е���Ҫ�l��֮һ��
3��1������ˮλ�Ĝy��
�������ʽҺλӋ�ښ�Һ����x̎�y���O����������ˣ���ˮλݔ��׃���M��“��Ȼؚw”����̎������Ч����ݔ����̖�ĸɔ_���ء����ʽҺλ �y������ʹ���������ȉ������ض�׃�����Һ�w���w �e( �ܶ�) ׃������ƽ������ݔ���IJֵ������ ׃��������ˮλ���ƻ�·�У����M���x��ʽƽ �������y������������ṩ�ʴ_�������Ĕ���������
3�� 2 ����ˮλ���Ԅӿ���
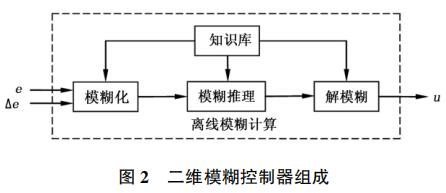
�˹�������Ҫ�о����˹��ķ����ͼ��g��ģ�¡� ����͔Uչ�˵����ܣ�ģ�����������ܿ��Ƶ�һ����Ҫ��֧�� ᘌ��T��Ӱ����أ��Y�� PID �{��Ҏ�ɡ����m �����F����������˹����ܵ�ģ�����ƣ��OӋ���� ʩ��偠t����ˮλ���ܿ��ơ� 偠t�\���еĸ��N�ɔ_���ؼ��з�ӳ��ˮλ��׃�����OӋһ�����Sģ����������������ˮλ�y�� ��ݔ�룬ˮλ�y��ֵ PV �c�O��ֵ SP Ӌ��õ� ƫ�� e��ƫ��׃���� Δe( �� e = PV �� SP��Δe = e') ���� ��ģ����������ݔ�롣��ģ���������ĽM����D 2��ʾ��
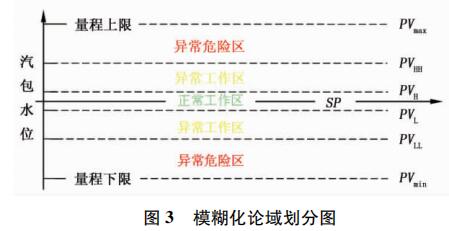
1) ݔ��׃��: PV ��׃��������0��500�ݣ�SP �� ׃��������0��500�ݣ�e ��׃�������ۣ� 50��50�ݣ���e �� ׃�������ۣ� 5��5�ݡ� PV ģ������PVmin��PVLL��PVL��SP��PVH��PVHH�� PVmax��Փ��Ą�����D 3 ��ʾ��
�Z��׃��: X1��X2��…��Xn�� X1 = ( PV �� SP) ∧����; X2 = ( PV �� SP) ∧�½�;
X3 = ( PV �� SP) ∧����;
X4 = ( PV �� SP) ∧�½�;
X5 = ( PV �� PVH ) ∧����;
X6 = ( PV �� PVH ) ∧�½�;
X7 = ( PV �� PVL ) ∧����;
X8 = ( PV �� PVL ) ∧�½�;
X9 = ( PV �� PVHH ) ∧����;
X10 = ( PV �� PVHH ) ∧�½�;
X11 = ( PV �� PVLL ) ∧����;
X12 = ( PV �� PVLL ) ∧�½���
( 2) ݔ��׃��: u1��u2��…��un��
( 3) ����׃��: OP��
( 4) ģ�������� IF( X1 = T or X2 = T or X3 = T or X4 = T) and PV �� PVH THEN Ҏ�t 1;
IF ( X1 = T or X2 = T or X3 = T or X4 = T) and PV �� PVL THEN Ҏ�t 1;
IF X5 = T and PV �� PVHH THEN Ҏ�t 2;
IF X6 = T and PV �� PVHH THEN Ҏ�t 1;
IF X7 = T and PV �� PVLL THEN Ҏ�t 1;
IF X8 = T and PV �� PVLL THEN Ҏ�t 3;
IF X9 = T THEN Ҏ�t 4; IF X10 = T THEN Ҏ�t 5;
IF X11 = T THEN Ҏ�t 6; IF X12 = T THEN Ҏ�t 7��
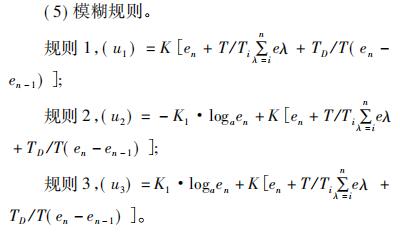
Ҏ�t 1 �� Ҏ�t 3 ��: K��K1 ���������; T �����
����; Ti ���ۼ�����; TD �鳬ǰ���ӡ�
Ҏ�t 4��( u4 ) = �� K2·f( en ) �Ȱٷֱ��f�p; Ҏ�t 5��( u5 ) = Ts_�ۣ� K2·f( en) �ݶ��r�Ȱٷ� ���f�p;
Ҏ�t 6��( u6 ) = Ts_��K2·f( en) �ݶ��r�Ȱٷֱ� �f��;Ҏ�t 7��( u7 ) = K2·f( en ) �Ȱٷֱ��f����
Ҏ�t 4 �� Ҏ�t 7 ��: K2 ���������; f( en ) ������“Ҏ�t i”���\��ģ��; Ts ���\�����ڵĶ��r����
( 6) ��ģ������
����( ���_) ��: OP = OP + u1 ; OP = OP + u2 ; OP = OP + u3 ; OP = OP + u4 ; OP = OP + u5 ; OP = OP + u6 ; OP = OP + u7�� ����ˮλ�� PVL �� PVH �����ȣ���ʩ“Ҏ�t 1” �\����ƣ��M��偠tϵ�y���������Ĺ����^�̡�
������ˮλ��������PVH��PVHH�݅^����½��� ��PVLL��PVL�݅^�����“Ҏ�t 2”“Ҏ�t 3”( ģ���a ����) ���oˮ���M��������
������ˮλ��������PVHH��PVmax�݅^����½��� ��PVmin��PVLL�݅^�����“Ҏ�t 4”“Ҏ�t 5”“Ҏ�t 6” “Ҏ�t 7”( ģ���a����) ���oˮ���M�ж���������Ȼ ���M��ģ���֏�����ˮλ��Σ�U׃����
��ʩ偠t����ˮλ�Ԅӽoˮ���ܿ��Ƽ��g�Ę� ����D 4 ��ʾ�� ���`�C��: Fuzzy �� PID ��Ͽ��ƌ� CFB 偠t����ˮλ�Ľoˮ�{�����܉�M��偠t�\�й�ˇ������������ˮλ������ ± 50 mm �����ȡ�
4 ����ˮλ���ܿ��ƌ���
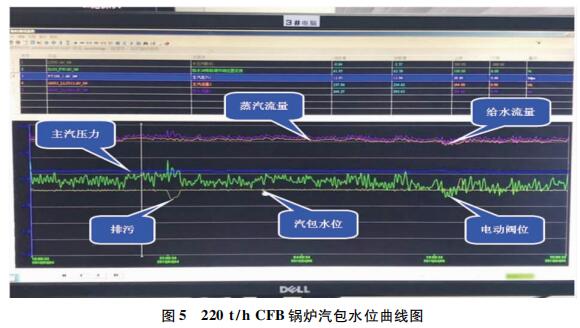
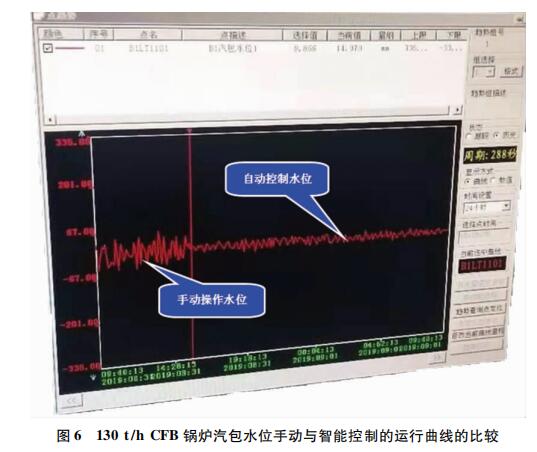
ԓ�Ԅӿ���ϵ�y������ɽ���L�λ��ҹ��I�����Ԃ�늏S1 �_220 t /h CFB 偠t�ϣ����ò���M�Мy����偠t����ˮλ���������� ± 10 mm �ԃ�; ԓ�� �ӿ���ϵ�y�����������Ԫ���F�\Դ������늷֏S 2 �_ 130 t /h CFB 偠t�ϣ��������ʽ�M�Мy����� �t����ˮλ���������� ± 20 mm �ԃȡ����Կ���: �p����ȼ��ϵ�y���ŷŵȭh���ĸɔ_���ء�
�D 5 ��ɽ�����ҹ��I�����Ԃ�늏S 220 t /h CFB 偠t����ˮλ���ܿ����\���������D 6 ����� ��Ԫ�\Դ������늷֏S 130 t /h CFB 偠t����ˮλ�ք��c���ܿ��Ƶ��\�������ı��^��r��
���^�L�r�g�\�У��C�� CFB 偠t����ˮλ���ܿ�����������: ����ˮλ�����������`������ȫ�ɿ��Ըߣ���Ч�����˃ȡ���_�����صĸɔ_���M���˿���Ҫ��
5 �Y�Z
����偠t��ˮλ�����^�̾��зǾ��ԡ��������ԡ��r�������c�����y��偠tˮλ����ϵ�y�����ô� �����_�� PID ���ƣ���������ܷ����������ܺܺõ� ��Q“̓��Һλ”������^��ɔ_�Ć��}������ Fuzzy �� PID ��Ͽ�����Ч����������ؓ��׃����ȼ �����r׃����ˮ����׃��������ˮλ��Ӱ푣����F��偠t�İ�ȫ�\�С�